Calculus 3
12.1: Three-Dimensional Coordinate Systems
Distance Formula for 3-Dimensions
$$
d = \sqrt{(x_2 - x_1)^2 + (y_2 - y_1)^2 + (z_2 - z_1)^2}
$$
Derivation: Pythagorean Theorem
Equation of a Sphere
Center, $C(h, k, l)$ and radius, $r$
$$
(x-h)^2 + (y-k)^2 + (z-l)^2 = r^2
$$
Exercises
12.1 Problem 9
Find the lengths of the side of the triangle $PQR$. Is it a right triangle? Is it an isosceles triangle?
$P(3, -2, -3), \ Q(7, 0, 1),\ R(1, 2, 1)$
$$
s_1 = PQ = \sqrt{(x_p - x_q)^2 + (y_p - y_q)^2 + (z_p - z_q)^2} = \sqrt{4^2 + 2^2 + 4^2} = \sqrt{36} = 6
$$
$$
s_2 = QR = \sqrt{(x_q - x_r)^2 + (y_q - y_r)^2 + (z_q - z_r)^2} = \sqrt{6^2 + 2^2 + 0^2} = \sqrt{40} = 2\sqrt{10}
$$
$$
s_3 = PR = \sqrt{(x_p - x_r)^2 + (y_p - y_r)^2 + (z_p - z_r)^2} = \sqrt{2^2 + 4^2 + 4^2} = \sqrt{36} = 6
$$
Isosceles Triangle
Not a right triangle since $6^2 + 6^2 \neq 40$ (sides are not a pythagorean triplet)
12.1 Problem 13
Find an equation of the sphere with center (-3, 2, 5) and radius 4. What is the intersection of this sphere with the $yz$-plane?
$$
(x-h)^2 + (y-k)^2 + (z-l)^2 = r^2
$$
$$
(x+3)^2 + (y-2)^2 + (z-5)^2 = 4^2
$$
$$
(x+3)^2 + (y-2)^2 + (z-5)^2 = 16
$$
The intersection with the $yz$-plane will yield a circle.
Let $r_2$ be the radius of the circle created from the intersection.

$$
r_2 = \sqrt{4^2 - 3^2} = \sqrt{7}
$$
Thus the equation of the intersecting circle is
$$
(z - 5)^2 + (y-2)^2 = r_2^2
$$
$$
(z - 5)^2 + (y-2)^2 = 7
$$
12.1 Problem 15
Find an equation of the sphere that passes through the point (4, 3, -1) and has center (3, 8, 1)
$$
r = d = \sqrt{(4-3)^2 + (3-8)^2 + (-1 - 1)^2} = \sqrt{1 + 25 + 4} = \sqrt{30}
$$
$$
r^2 = (x-3)^2 + (y-8)^2 + (z - 1)^2 = 30
$$
12.2: Vectors
Vector: Quantity with both magnitude and direction (denoted v or $\vec{v}$ and graphically as an arrow)
- Initial Point indicated by the “tail” of the arrow and the ending point is represented by the “head” of the arrow
Combining Vectors
-
$\overrightarrow{AB} + \overrightarrow{BC} = \overrightarrow{AC}$
-
The Triangle Law and Parallelogram Law are just ways of geometrically representing vector addition.
-
Scalar Multiplication: If $c$ is a scalar and $v$ is a vector, then cv is just the vector, $v$ with length multiplied by $|c|$. If $v = 0$, then $cv = 0$
-
Multiplying a vector by -1 means flipping the direction of the vector
-
$u - v = u + (-v)$
Components
- If a vector, $a$ starts at the origin, then the coordinates are either $(a_1, a_2)$ or $(a_1, a_2, a_3)$ (2d vs. 3d)
- These coordinates are called the components of $a$ and denoted with $\ev{a_1, a_2}$ or $\ev{a_1, a_2, a_3}$
Given the points $A(x_1, y_1, z_1)$ and $B(x_2, y_2, z_2)$, the vector $\textbf{a}$ with representation $\overrightarrow{AB}$ is
$$ \textbf{a} = \ev{x_2 - x_1, y_2 - y_1, z_2 - z_1}$$ - The magnitude/length of the vector $\textbf{v}$ is the following:
$$ |\textbf{a}| = \sqrt{a_1^2 + a_2^2 + a_3^2}$$
Properties of Vectors
- $\textbf{a + b = b + a}$
- $\textbf{a + 0 = a}$
- $c(\textbf{a + b}) = c\textbf{a} + c\textbf{b}$
- $(cd)\textbf{a} = c(d\textbf{a})$
- $\textbf{a + (b + c) = (a + b) + c}$
- $\textbf{a + (-a) = 0}$
- $(c + d)\textbf{a} = c\textbf{a} + d\textbf{a}$
- $1\textbf{a = a}$
Standard Basis Vectors and Unit Vectors
$$ \textbf{i} = \ev{1, 0, 0}$$
$$ \textbf{j} = \ev{0, 1, 0}$$
$$ \textbf{k} = \ev{0, 0, 1}$$
$\textbf{i}$, $\textbf{j}$, and $\textbf{k}$ are Standard Basis Vectors which point in the direction of the x, y, or z axis and have a length of 1
- If a = $\ev{a_1, a_2, a_3}$, then a = $a_1 \textbf{i} + a_2 \textbf{j} + a_3 \textbf{k}$
Unit Vector: Vector with length 1 (So i, j, and k are examples of unit vectors)
- If $a \neq 0$, then the unit vector with the same direction as a is
$$ \textbf{u} = \frac{\textbf{a}}{|\textbf{a}|} $$
Applications
- Acceleration and Velocity
- Force
- The resultant force or net force can be found by vector addition of the individual forces acting on an object
Exercises
Problem 2
What is the relationship between the point (4, 7) and the vector $\ev{4, 7}$? Illustrate with a sketch.
If the vector’s tail or starting point is located at the origin, then the head will be at the point (4, 7).

Problem 3
Name all the equal vectors in the parallelogram shown.

$$\overrightarrow{EA} = \overrightarrow{CE}\ \ \ \ \ \ \ \ \overrightarrow{DE} = \overrightarrow{EB}\ \ \ \ \ \ \ \ \overrightarrow{DA} = \overrightarrow{CB} \ \ \ \ \ \ \ \overrightarrow{AB} = \overrightarrow{DC}$$
Problem 4
Write each combination of vectors as a single vector.

a. $\overrightarrow{AC}$
b. $\overrightarrow{CB}$
c. $\overrightarrow{DB} - \overrightarrow{AB} = \overrightarrow{DB} + \overrightarrow{BA} = \overrightarrow{DA}$
d. $\overrightarrow{DC} + \overrightarrow{CA} + \overrightarrow{AB} = \overrightarrow{DA} + \overrightarrow{AB} = \overrightarrow{DB}$
Problem 6
Copy the vectors in the figure and use them to draw the following vectors.

Problem 7
In the figure, the tip of c and the tail of d are both the midpoint of $QR$. Express c and d in terms of a and b.

$$
c + d = b
$$
$$
c + (-d) = a
$$
$$
(c+d) + (c - d) = b+a
$$
$$
2c = b + a \implies c = \frac{b + a}{2}
$$
$$
\frac{b+a}{2} + d = b
$$
$$
d = b - \frac{b + a}{2} = \frac{2b - (b + a)}{2} = \frac{b - a}{2}
$$
Problem 8
If the vectors in the figure satisfy |u| = |v| = 1 and u + v + w = 0, what is |w|?

|w| = $\sqrt{2}$
Problem 9
Find a vector a with representation given by the directed line segment $\overrightarrow{AB}$. Draw $\overrightarrow{AB}$ and the equivalent representation starting at the origin.
$$ A(-2, 1), \ \ B(1, 2)$$
$$ \textbf{a} = \ev{1 - (-2), 2 - 1} = \ev{3, 1}$$

Problem 13
Find a vector a with representation given by the directed line segment $\overrightarrow{AB}$. Draw $\overrightarrow{AB}$ and the equivalent representation starting at the origin.
$$ A(0, 3, 1), \ \ B(2, 3, -1)$$
$$ \textbf{a} = \ev{2 - 0, 3 - 3, -1 - 1} = \ev{2, 0, -2}$$
Problem 15
Find the sum of the given vectors and illustrate geometrically.
$$ \ev{-1, 4}, \ \ \ev{6, -2}$$
$$ \ev{6 + (-1), -2 + 4} = \ev{5, 2}$$
Problem 17
Find the sum of the given vectors and illustrate geometrically.
$$ \ev{3, 0, 1}, \ \ \ev{0, 8, 0}$$
$$ \ev{3 + 0, 0 + 8, 1 + 0} = \ev{3, 8, 1}$$
Problem 19
Find a + b, 4a + 2b, |a|, and |a - b|.
a = $\ev{-3, 4}$, b = $\ev{9, -1}$
a + b =
$$\ev{-3 + 9, 4 + (-1)} = \ev{6, 3}$$
4a + 2b =
$$(4) \ev{-3, 4} + (2) \ev{9, -1}$$
$$ = \ev{-12, 16} + \ev{18, -2}= \ev{-12 + 18, 16 + (-2)}$$
$$ = \ev{6, 14}$$
|a| =
$$ \sqrt{(-3)^2 + 4^2} = \sqrt{9 + 16} = \sqrt{25} = 5 $$
a - b =
$$ \ev{-3, 4} - \ev{9, -1} = \ev{-3, 4} + \ev{-9, 1}$$
$$
\ev{-3 + -9, 4 + 1} = \ev{-12, 5}
$$
|a - b| =
$$ \sqrt{(-12)^2 + 5^2} = \sqrt{144 + 25} = \sqrt{169} = 13 $$
Problem 21
Find a + b, 4a + 2b, |a|, and |a - b|.
a = $4\textbf{i} - 3\textbf{j} + 2\textbf{k}$, b = $2\textbf{i} - 4\textbf{k}$
a + b =
$$ (4 + 2)\textbf{i} + (-3 + 0)\textbf{j} + (2+ (-4))\textbf{k} = 6\textbf{i} -3\textbf{j} - 2\textbf{k} $$
4a + 2b =
$$
4(4\textbf{i} - 3\textbf{j} + 2\textbf{k}) + 2(2\textbf{i} - 4\textbf{k}) = (16\textbf{i} - 12\textbf{j} + 8\textbf{k}) + (4\textbf{i} - 8\textbf{k}) = 20\textbf{i} -12\textbf{j} + 0\textbf{k}
$$
$$
= 20\textbf{i} - 12\textbf{j}
$$
|a| =
$$
\sqrt{4^2 + (-3)^2 + (2)^2} = \sqrt{16 + 9 + 4} = \sqrt{29}
$$
a - b =
$$ (4 - 2)\textbf{i} + (-3 - 0)\textbf{j} + (2 - (-4))\textbf{k} = 2\textbf{i} -3\textbf{j} + 6\textbf{k} $$
|a - b| =
$$
\sqrt{2^2 + (-3)^2 + 6^2} = \sqrt{4 + 9 + 36} = \sqrt{49} = 7
$$
Problem 23
Find a unit vector that has the same direction as the given vector.
$$
\ev{6, -2}
$$
$$ \textbf{u} = \frac{\textbf{a}}{|\textbf{a}|} = \ev{6, -2} \frac{1}{\sqrt{6^2 + (-2)^2}} = \ev{6, -2} \frac{1}{\sqrt{40} } = \ev{6, -2} \frac{1}{2\sqrt{10}} $$
$$
= \ev{\frac{6}{2\sqrt{10}}, \frac{-2}{2\sqrt{10} }} = \ev{\frac{3}{\sqrt{10}}, -\frac{1}{\sqrt{10}}}
$$
Problem 25
Find a unit vector that has the same direction as the given vector.
$$
8\textbf{i} - \textbf{j} + 4\textbf{k}
$$
$$ \textbf{u} = \frac{\textbf{a}}{|\textbf{a}|} = (8\textbf{i} - \textbf{j} + 4\textbf{k} ) \frac{1}{\sqrt{8^2 + (-1)^2 + 4^2}} = (8\textbf{i} - \textbf{j} + 4\textbf{k} ) \frac{1}{\sqrt{64 + 1 + 16} } =(8\textbf{i} - \textbf{j} + 4\textbf{k} ) \frac{1}{\sqrt{81} } $$
$$
= (8\textbf{i} - \textbf{j} + 4\textbf{k} ) \frac{1}{9} = \frac{8}{9}\textbf{i} - \frac{1}{9}\textbf{j} + \frac{4}{9}\textbf{k}
$$
Problem 26
Find the vector that has the same direction as $\ev{6, 2, -3}$ but has length 4.
$$
\textbf{u} = \frac{\textbf{a}}{|\textbf{a}|} = \ev{6, 2, -3} \frac{1}{\sqrt{6^2 + 2^2 + (-3)^2}} = \ev{6, 2, -3} \frac{1}{36 + 4 + 9} = \ev{6, 2, -3} \frac{1}{\sqrt{49}} = \ev{\frac{6}{7}, \frac{2}{7}, -\frac{3}{7}}
$$
$$
4\textbf{u} = 4 \ev{\frac{6}{7}, \frac{2}{7}, -\frac{3}{7}} = \ev{\frac{24}{7}, \frac{8}{7}, -\frac{12}{7}}
$$
Problem 29
If v lies in the first quadrant and makes an angle $\frac{\pi}{3}$ with the positive $x$-axis and |v| = 4, find v in component form.

$$
\ev{4\cos{\frac{\pi}{3}}, 4\sin{\frac{\pi}{3}}} = \ev{\frac{4(1)}{2}, \frac{4 \sqrt{3} }{2}}
$$
$$
\ev{2, 2\sqrt{3}}
$$
Problem 43
If $A$, $B$, and $C$ are the vertices of a rectangle, find $\overrightarrow{AB} + \overrightarrow{BC} + \overrightarrow{CA}$
$$
\overrightarrow{AB} + \overrightarrow{BC} + \overrightarrow{CA} = \overrightarrow{AC} + \overrightarrow{CA} = \overrightarrow{AA} = 0
$$
Problem 44
Let $C$ be the point on the line segment $AB$ that is twice as far from $B$ as it is from $A$. If $\textbf{a} = \overrightarrow{OA}$, $\textbf{b} = \overrightarrow{OB}$, and $\textbf{c} = \overrightarrow{OC}$, show that $\textbf{c} = \frac{2}{3} \textbf{a} + \frac{1}{3}\textbf{b}$.

$$
-\textbf{a} = \overrightarrow{AO}
$$
$$
-a + b = \overrightarrow{AO} + \overrightarrow{OB} = \overrightarrow{AB}
$$
$$
\overrightarrow{AB} = \overrightarrow{AC} + \overrightarrow{CB} = \frac{1}{2}\overrightarrow{CB} + \overrightarrow{CB}
$$
$$
\overrightarrow{CO} + \overrightarrow{OB} = \overrightarrow{CB} = -\textbf{c} + \textbf{b}
$$
$$
\overrightarrow{AB} = \frac{1}{2}\overrightarrow{CB} + \overrightarrow{CB} = \frac{1}{2}(-c + b) + (-c + b)
$$
$$
(-a + b) = \frac{3}{2}(b - c)
$$
$$
\frac{2}{3}b - \frac{2}{3}a = b - c
$$
$$
\frac{2}{3}b - b - \frac{2}{3}a = -c
$$
$$
b - \frac{2}{3}b + \frac{2}{3}a = c
$$
$$
c = \frac{1}{3}b + \frac{2}{3}a
$$
Problem 45
a. Draw the vectors a = $\ev{3, 2}$, b = $\ev{2, -1}$, and c = $\ev{7, 1}$.
b. Show, by means of a sketch, that there are scalars $s$ and $t$ such that $\textbf{c} = s\textbf{a} + t\textbf{b}$.

Problem 47
If $\textbf{r} = \ev{x, y, z}$ and $\vb{r_0} = \ev{x_0, y_0, z_0}$, describe the set of all points $(x, y, z)$ such that $|\vb{r} - \vb{r_0}| = 1$.
$$
\vb{r} - \vb{r_0} = \ev{x - x_0, y-y_0, z-z_0}
$$
$$
|\vb{r} - \vb{r_0}| = \sqrt{(x-x_0)^2 + (y-y_0)^2 + (z-z_0)^2} = 1
$$
$$
(x-x_0)^2 + (y-y_0)^2 + (z-z_0)^2 = 1^2
$$
The set of all points will form a sphere with center $(x_0, y_0, z_0)$ with a radius of $1$.
12.3: The Dot Product
If $\vb{a} = \ev{a_1, a_2, a_3}$ and $\vb{b} = \ev{b_1, b_2, b_3}$, then the dot product of $\vb{a}$ and $\vb{b}$ is denoted by $\vb{a} \cdot \vb{b}$ and is calculated by the following
$$ \vb{a} \cdot \vb{b} = a_1 b_1 + a_2 b_2 + a_3 b_3$$
The result of the dot product is a scalar quantity, not a vector.
Properties of the Dot Product
If $\vb{a}, \vb{b}, \vb{c}$ are vectors in $V_3$ and $c$ is a scalar, then
- $\vb{a} \cdot \vb{a} = |\vb{a}|^2$
- $\vb{a} \cdot \vb{b} = \vb{b} \cdot \vb{a}$
- $\vb{a} \cdot (\vb{b} + \vb{c}) = \vb{a} \cdot \vb{b} + \vb{a} \cdot \vb{c}$
- $(c\vb{a}) \cdot \vb{b} = c (\vb{a} \cdot \vb{b}) = \vb{a} \cdot (c\vb{b})$
- $0 \cdot \vb{a} = 0$
If $\theta$ is the angle between the vectors $\vb{a}$ and $\vb{b}$, then
$$\vb{a} \cdot \vb{b} = |\vb{a}||\vb{b}|\cos\theta$$
Two vectors $\vb{a}$ and $\vb{b}$ are perpendicular/orthogonal iff $\vb{a} \cdot \vb{b} = 0$
Direction Angles and Direction Cosines
Direction Angles are the angles $\alpha, \beta, \gamma$ that $\vb{a}$ makes with the positive x-, y-, and z-axes, respectively.
$$ \vb{a} = |\vb{a}|\ev{\cos\alpha, \cos \beta, \cos\gamma}$$
Unit vector in direction of $\vb{a}$:
$$ u = \frac{1}{|\vb{a}|} \vb{a} = \ev{\cos \alpha, \cos \beta, \cos \gamma}$$
Projections
- Vector Projection of $\vb{b}$ onto $\vb{a}$ is like the shadow of $\vb{b}$ in the direction of $\vb{a}$
- The scalar projection of $\vb{b}$ onto $\vb{a}$ (also called the component of b along a) is defined to be the signed magnitude of the vector projection
$$ comp_a \vb{b} = \frac{\vb{a} \cdot \vb{b}}{|\vb{a}|} = |\vb{b}| \cos \theta$$
$$ proj_a \vb{b} = \left(\frac{\vb{a} \cdot \vb{b}}{|\vb{a}|}\right) \frac{\vb{a}}{|\vb{a}|} = \frac{\vb{a} \cdot \vb{b}}{|\vb{a}|^2} \vb{a}$$
$\theta$ is just the angle between the vectors.
The vector projection is the scalar projection times the unit vector in the direction of $\vb{a}$
Work
$W = \vb{F} \cdot \vb{d}$
12.4: The Cross Product
- The Cross Product of $\vb{a}$ and $\vb{b}$ gives a vector that is perpendicular to both vectors (use right hand rule to find out direction of resultant vector)
- If $\vb{a} = \ev{a_1, a_2, a_3}$ and $\vb{b} = \ev{b_1, b_2, b_3}$, then the cross product of $\vb{a}$ and $\vb{b}$ is the vector
$$ \vb{a} \times \vb{b} = \ev{a_2b_3 - a_3 b_2, a_3 b_1 - a_1b_3, a_1b_2, a_1b_2 - a_2 b_1} $$
Derivation: define a vector $\vb{c}$ that is perpendicular to both $\vb{a}$ and $\vb{b}$ such that the dot product is 0 - Matrices can represent the above in a simpler fashion and less arbitrary looking way:
$$
\vb{a} \cross \vb{b} =
\begin{bmatrix}
\vb{i} & \vb{j} & \vb{k} \\
a_1 & a_2 & a_3 \\
b_1 & b_2 & b_3
\end{bmatrix} = \begin{bmatrix}
a_2 & a_3 \\
b_2 & b_3
\end{bmatrix} \vb{i} - \begin{bmatrix}
a_1 & a_3 \\
b_1 & b_3
\end{bmatrix} \vb{j} +
\begin{bmatrix}
a_1 & a_2 \\
b_1 & b_2
\end{bmatrix} \vb{k}
$$
-
Notice how the terms each have a unit vector and the determinant order 2 matrix is constructed from the original order 3 matrix with the row and column of the unit vector removed.
-
The determinant of order 2:
$$
\begin{bmatrix}
a & b \\
c & d
\end{bmatrix} = ad - bc
$$ -
If $\theta$ is the angle between $\vb{a}$ and $\vb{b}$, then $|\vb{a} \cross \vb{b}| = |\vb{a} \mid \vb{b}| \sin\theta$
-
Two nonzero vectors $\vb{a}$ and $\vb{b}$ are parallel if and only if $\vb{a} \cross \vb{b} = 0$
-
The length of the cross product is equal to the area of the parallelogram formed by $\vb{a}$ and $\vb{b}$
-
The cross product is NOT commutative or associative
Properties of the Cross Product
- $\vb{a} \cross \vb{b} = -\vb{b} \cross \vb{a}$
- $(c\vb{a})\cross \vb{b} = c(\vb{a} \cross \vb{a}) = \vb{a} \cross (c\vb{b})$
- $\vb{a} \cross (\vb{b} + \vb{c}) = \vb{a} \cross \vb{b} + \vb{a} \cross \vb{c}$
- $(\vb{a} + \vb{b}) \cross \vb{c} = \vb{a} \cross \vb{c} + \vb{b} \cross \vb{c}$
- $\vb{a} \cdot (\vb{b} \cross \vb{c}) = (\vb{a} \cross \vb{b}) \cdot \vb{c}$
- $\vb{a} \cross (\vb{b} \cross \vb{c}) = (\vb{a} \cdot \vb{c}) \vb{b} - (\vb{a} \cdot \vb{b}) \vb{c}$
Triple Products
- Scalar triple product (Property 5):
$$
\vb{a} \cdot (\vb{b} \cross \vb{c}) = \begin{bmatrix}
a_1 & a_2 & a_3 \\
b_1 & b_2 & b_3 \\
c_1 & c_2 & c_3
\end{bmatrix}
$$ - The scalar triple product describes the volume of the parallelepiped
- Vector triple product: Property 6
Torque
$|\vb{\tau}| = |\vb{r} \cross \vb{F}|$
12.5: Equations of Lines and Planes
Lines
$L$ is a line in 3d space. The vector equation of $L$ is the following
$$ \vb{r} = \vb{r_0} + t\vb{v}$$
where $t$ is a parameter, $\vb{r_0}$ is a position vector to a point on L, and $\vb{r}$ gives a point on L.
If $\vb{r} = \ev{x, y, z}$ and $\vb{r_0} = \ev{x_0, y_0, z_0}$,
the parametric equations for a line through the point ($x_0, y_0, z_0$) and parallel to the direction vector $\ev{a, b, c}$ are
$$ x = x_0 + at, \ \ \ y = y_0 + bt, \ \ \ z = z_0 + ct$$
Symmetric Equations of L:
$$ \frac{x-x_0}{a} = \frac{y-y_0}{b} = \frac{z-z_0}{c} $$
If $a$, $b$, or $c$ are 0:
- Example: If $a = 0$, then $x_0 = x \ \ \ \ \frac{y-y_0}{b} = \frac{z-z_0}{c}$, and the line L lies in the vertical plane $x=x_0$
Line segment from $r_0$ to $r_1$:
$$ \vb{r}(t) = (1-t)\vb{r_0} + t\vb{r_1} \ \ \ \ 0 \le t \le 1 $$
Planes
Vector Equation of the Plane:
$$ \vb{n} \cdot (\vb{r} - \vb{r_0}) = 0$$
$$ \vb{n} \cdot \vb{r} = \vb{n} \cdot \vb{r_0}$$
$n$ is the normal vector (perpendicular to the plane)
$r_0$ and $r$ are position vectors
$r - r_0$ represent a line on the plane.
Scalar Equation of the Plane:
$$ a(x-x_0) + b(y-y_0) + c(z - z_0) = 0$$
where $\vb{n} = \ev{a, b, c}$ and point $P_0(x_0, y_0, z_0)$ is on the plane
Linear Equation Form of the Scalar Equation of a Plane
$$ ax + by + cz + d = 0$$
where $d = -(ax_0 + by_0 + cz_0)$
Two planes are parallel if their normal vectors are parallel.
Distances
$$ D = \frac{|ax_1 + by_1 + cz_1 + d|}{\sqrt{a^2 + b^2 + c^2}}$$
Derivation: The distance from an arbitrary point to a plane is the scalar projection of the distance between any point on the plane and the arbitrary point onto the normal vector.
12.6: Cylinders and Quadratic Surfaces
-
Traces/Cross Sections: Curves of intersections of surfaces with planes parallel to the coordinate planes
-
Steps for sketching surface:
- Find intercepts by settings two variables to zero and solving for third
- Make the “different” variable the axis that the surface is formed around (vertical axis) (e.g. all other variables on one side of equation or only one variable has negative)
- Determine the “traces” by holding one variable constant and seeing what the equation with two variables represents (hyperbola, parabola, or ellipse)
Cylinders
-
Cylinder: Surface with all lines (rulings) parallel to a given line and pass through a given plane curve.
-
Equation only has two variables (e.g. $x^2 + y^2 = 1$, $y^2 + z^2 = 1$
-
Example: $z = x^2$
-
Let $z$ be the vertical axis
-
If $y$ is set to be a constant, it doesn’t affect the equation and the traces formed by intersection with the xz plane will form parabolic cross sections since $z= x^2$ is a parabola when graphed on the x-z plane
-
If $z$ is held constant, you have $c = x^2$, where c is a constant. This equation is just two lines on the xy plane. So the traces formed from the intersection with the xz plane will form cross sections that consist of two lines.
-
If $x$ is held constant, you have $z = c$, where c is a constant. This is just the equation of one line on the yz plane.
Quadratic Surfaces
- Equations have the form $Ax^2 + By^2 + Cz^2 + Dxy + Eyz + Fxz + Gx + Hy + Iz + J = 0$
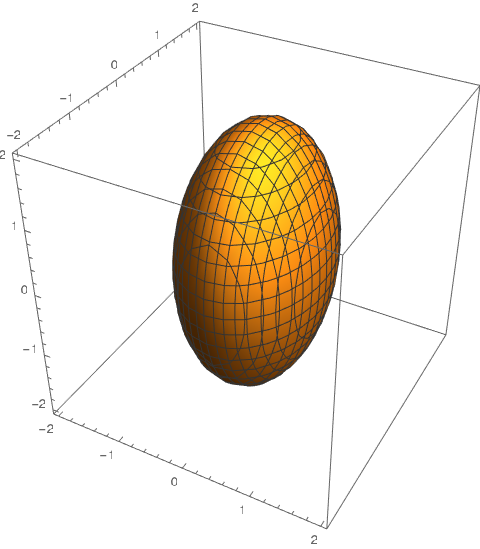
Ellipsoid
- All traces are ellipses
- If $a = b= c$, the ellipsoid is a sphere
- $\frac{x^2}{a^2} + \frac{y^2}{b^2} + \frac{z^2}{c^2} = 1$
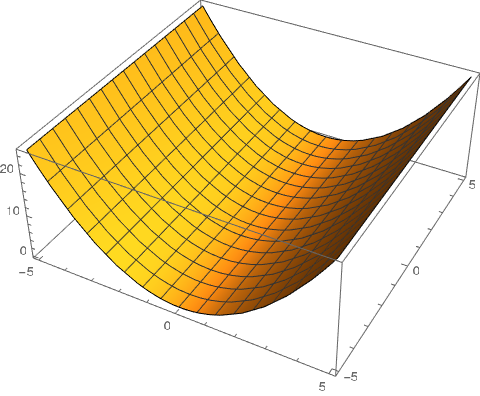
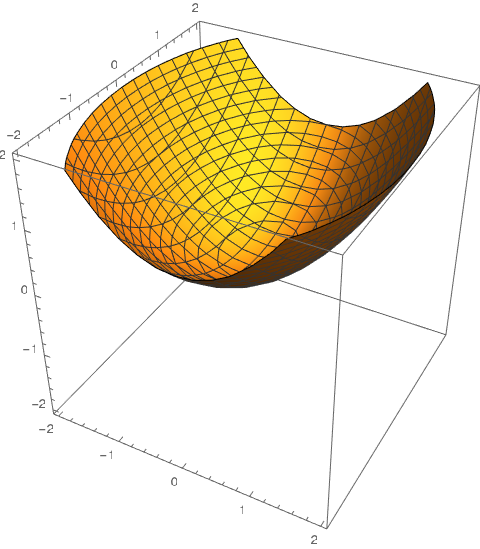
Elliptic Paraboloid
- Horizontal traces (cross sections formed by intersection with xy plane) are ellipses
- Vertical traces are parabolas
- Axis of the parabola is the one that’s different (the one with degree one in the equation)
- $\frac{z}{c} = \frac{x^2}{a^2} + \frac{y^2}{b^2}$
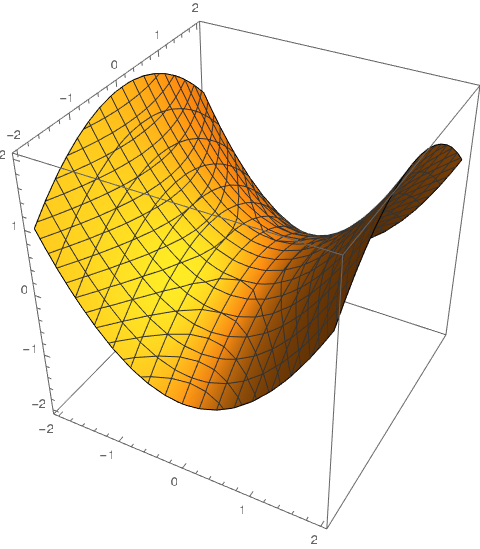
Hyperbolic Paraboloid
- Horizontal traces (cross sections formed by intersection with planes parallel to the xy plane) are hyperbolas
- Vertical traces (cross sections formed by intersection with planes parallel to the yz and xz planes) are parabolas
- $\frac{z}{c} = \frac{x^2}{a^2} -\frac{y^2}{b^2}$
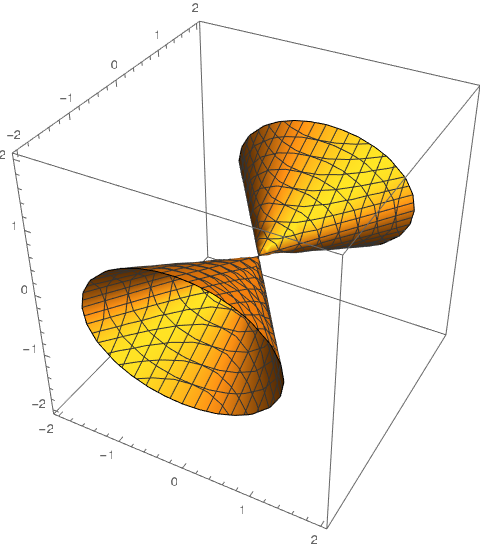
Cone
- Horizontal traces are ellipses
- Vertical traces are planes (except when x = 0 and y = 0 when the traces are a pair of lines)
- $\frac{z^2}{c^2} = \frac{x^2}{a^2} + \frac{y^2}{b^2}$
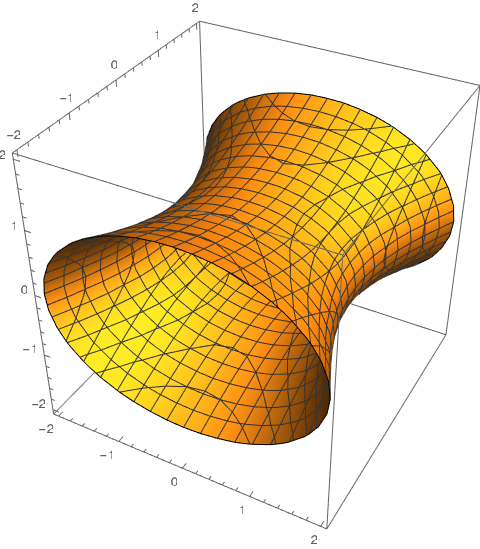
Hyperboloid of One Sheets
- Horizontal traces are ellipses
- Vertical traces are hyperbolas
- $\frac{x^2}{a^2} + \frac{y^2}{b^2} - \frac{z^2}{c^2} = 1$
Hyperboloid of Two Sheets
- Horizontal traces are ellipses if they exist
- Vertical traces are hyperbolas
- $-\frac{x^2}{a^2} - \frac{y^2}{b^2} + \frac{z^2}{c^2} = 1$
13.1: Vector Functions and Space Curves
Vector Function: Domain: A set of real numbers, Range: A set of vectors
- Let $\vb{r}$ be a vector function for 3-d vectors
- The components of $\vb{r}$ are $f$, $g$, and $h$.
$$ \vb{r}(t) = \ev{f(t), g(t), h(t)} = f(t)\vb{i} + g(t) \vb{j} + h(t) \vb{k}$$
Limits and Continuity
$$\vb{r}(t) = \ev{f(t), g(t), h(t)}$$
$$ \lim_{t \to a} \vb{r}(t) = \ev{\lim_{t \to a} f(t), \lim_{t \to a} g(t), \lim_{t \to a} h(t)} $$
As long as the limits of the component functions exist.
$\vb{r}$ is continuous at $a$ if $\lim_{t\to a} \vb{r}(t) = \vb{r}(a)$
Space Curves
- $C$ is the set of all points $(x, y, z)$ where $x = f(t), y = g(t), z = h(t)$ (Parametric equations of C with $t$ as the parameter)
- Space Curve: The set of points in $C$
- $C$ is traced out by the tip of the vector $\vb{r}(t)$
Drawing Curves
- To sketch parametric equations, remove $t$ from the equation and get the equations in terms of the $x$, $y$, and $z$ instead
- Then you can draw those equations on the x-y, y-z, and x-z planes. These “shadows” will represent the projections of the actual curve onto those planes.
13.2: Derivatives and Integrals of Vector Functions
$$
\frac{d \vb{r}}{dt} = \vb{r}'(t) = \lim_{h \to 0} \frac{\vb{r}(t+h) - \vb{r}(t)}{h}
$$
Unit Tangent Vector
$$
\vb{T}(t) = \frac{\vb{r}'(t)}{|\vb{r}'(t)|}
$$
If $f$, $g$, and $h$ are differentiable and $\vb{r}$ is a vector function
$$
\vb{r}'(t) = \ev{f’(t), g’(t), h’(t)}
$$
Differentiation Rules
- $\frac{d}{dt}[\vb{u}(t) + \vb{v}(t)]=\vb{u}'(t) + \vb{v}'(t)$
- $\frac{d}{dt}[ c\vb{u}(t)] = c\vb{u}'(t)$
- $\frac{d}{dt}[f(t)\vb{u}(t)] = f’(t) \vb{u}(t) + f(t) \vb{u}'(t)$
- $\frac{d}{dt}[ \vb{u}(t) \cdot \vb{v}(t)] =\vb{u}'(t) \cdot \vb{t} + \vb{u}(t) \cdot \vb{v} ‘(t)$
- $\frac{d}{dt} [\vb{u}(t) \cross \vb{v}(t)] = \vb{u}'(t) \cross \vb{v}(t) + \vb{u}(t) \cross \vb{v}'(t)$
- $\frac{d}{dt}[ \vb{u}f(t)] = f’(t)\vb{u}'(f(t))$
Integrals
$$
\int_{a}^{b} \vb{r}(t) dt = \left(\int_{a}^{b} f(t)dt\right) \vb{i} + \left(\int_a^b g(t)dt \right) \vb{j} + \left(\int_a^b h(t)dt\right)\vb{k}
$$
13.3: Arc Length and Curvature
Length of a Curve
$$ L = \int_a^b \sqrt{\left(\frac{dx}{dt}\right)^2 + \left(\frac{dy}{dt}\right)^2 + \left(\frac{dx}{dt}\right)^2} dt= \int_{a}^{b} |\vb{r}'(t)| dt $$
Note that a space curve can be represented by different bu equivalent vector functions (e.g. $r(t) = \ev{t, t^2, t^3}$ is equivalent to $r(u) = \ev{e^u, e^{2u}, e^{3u}}$).
These different representations are called parameterizations of the curve and the arc length calculation does not change with the choice of parameterization.
The Arc Length Function
The arc length, $s$, can be defined calculated using the following:
$$ s(t) = \int_a^t \sqrt{\left(\frac{dx}{dt}\right)^2 + \left(\frac{dy}{dt}\right)^2 + \left(\frac{dx}{dt}\right)^2} dt$$
Sometimes a curve is parametrized with respect to arc length which means redefining $r(t)$ in terms of $s$ instead of $t$.
Curvature
A curve is smooth on an interval if $r'$ is continuous and $r’(t) \neq 0$ on an interval.
Tangent unit vector, $T$:
$$ \vb{T}(t) = \frac{\vb{r}'(t)}{|\vb{r}'(t)|}$$
Curvature of a curve:
$$
\kappa = \left| \frac{d\vb{T}}{ds} \right|
$$
$$
\kappa (t) = \frac{|\vb{T}'(t)|}{|\vb{r}'(t)|} = \frac{|\vb{r}'(t) \cross \vb{r}''(t)|}{|\vb{r}'(t)|^3}
$$
Normal and Binormal Vectors
-
Unit Normal Vector: $\vb{N}(t)$ is a special vector that is orthogonal to $\vb{T}$ (indicates where curve is turning)
$$
\vb{N}(t) = \frac{\vb{T}'(t)}{|\vb{T}'(t)|}
$$
Note that $\vb{T}(t) \cdot \vb{T}'(t) = 0$, so the derivative of $\vb{T}$ is orthogonal to $\vb{T}$. -
Binormal Vector: Also a unit vector but orthogonal to both $\vb{T}$ and $\vb{N}$
$$
\vb{B}(t) = \vb{T}(t) \cross \vb{N}(t)
$$ -
Normal Plane: Plane that contains $\vb{N}$ and $\vb{B}$. The plane contains all lines orthogonal to $\vb{T}$
-
Osculating Plane: Plane that contains $\vb{N}$ and $\vb{T}$. The plane is the plane that comes closest to containing the part of the curve near the point of the tangent.
13.4: Motion in Space: Velocity and Acceleration
Velocity Vector v(t):
$$ \vb{v}(t) = \lim_{h\to 0} \frac{\vb{r}(t+h) -\vb{r}(t)}{h} = \vb{r}'(t)$$
Speed:
$$ |\vb{v}(t)| = |\vb{r}'(t)| = \frac{ds}{dt} $$
Acceleration:
$$ \vb{a}(t) = \vb{v}'(t) = \vb{r}''(t)$$
Projectile Motion
Assuming Gravitational acceleration of, $g$ and no air resistance
$$ x = (v_0 \cos \alpha )t, \ \ \ \ y = (v_0 \sin \alpha ) t - \frac{1}{2} gt^2$$
Tangential and Normal Components of Acceleration
$$\vb{a} = v’\vb{T} + \kappa v^2 \vb{N}$$
$$a_T = v’ = \frac{\vb{v} \cdot \vb{a}}{v} = \frac{\vb{r}'(t) \cdot \vb{r}''(t)}{|\vb{r}'(t)|}$$
$$a_N = \kappa v^2 = \frac{|\vb{r}'(t) \cross \vb{r}''(t)}{|\vb{r}'(t)|}$$
14.1: Functions of Several Variables
- Function of two variables: Assigns ordered pair $(x, y)$, in a set $D$ a unique real number. $D$ is the domain and the range is the set. The function is denoted by $z = f(x, y)$, where $x$ and $y$ are independent variables and $z$ is the dependent variable. For a function of two variables, the domain is a subset of $\mathbb{R}^2$ and the range is a subset of $\mathbb{R}$ (the range is always like this).
Domain and Range
- A function can be visualized as a mapping between the domain and range, where each value in the domain only maps to one value in the range
- When graphing the domain, the number of dimensions is equal to the number of independent variables
- The range’s dimensions is always one
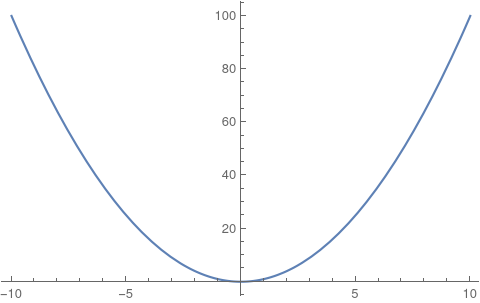
Graphs
-
Another way to visualize functions is by graphing
-
The number of dimensions required to graph a function is the number of independent variables + the number of dependent variables
- This means the dimensions of the graph of the functions is always independent variables + 1
-
For $z = f(x, y)$, the graph can thought of as a surface above or below the xy plane, where the domain is the xy plane
Level Curves (Contour Plots)
- The third way to visualize functions is with contour plots also known as level curves
- For functions of two variables, the level curves are the curves with equations
$$f(x, y) = k$$
where $k$ is a constant in the range of $f$. - Examples of contour plots are in topological maps that indicate how steep and high mountains or hills are
- When level curves are closer together, the surface is “steeper”
- For functions of two variables, the equation $f(x, y) = z = ax + by + c$ is called the linear function and represents a plane
14.3: Partial Derivatives
The $\textbf{partial derivative of } \mathbf{f} \textbf{ with respect to } \mathbf{x} \textbf{ at }\mathbf{(a, b)}$
$$ f_x(a, b) = g’(a) \ \ \text{where } g(x) = f(x, b)$$
$$ f_x(x, y) = \pdv{}{x} f(x, y) = \lim_{h\to 0} \frac{f(x+h, y) - f(x, y)}{h} $$
$$ f_y(x, y) = \pdv{}{y} f(x, y) = \lim_{h\to 0} \frac{f(x, y + h) - f(x, y)}{h} $$
- To find the partial derivative with respect to $x$, hold $y$ constant
- To find the partial derivative with respect to $y$, hold $x$ constant
Interpretations of Partial Derivatives
$$ z= f(x, y)$$
- For the above function/surface, if we have a point $P(a, b, c)$, then when we hold $x$ constant with $x = a$, we get a curve, since the plane $x = a$ intersected with the surface, $f$
- $g’(a) = f_x(a, b)$ represents the line tangent to the curve at that point.
Higher Derivatives
$$(f_{x})_{y} = f_{xy} = \pdv{}{y}\left(\pdv{f}{x}\right) = \pdv[2]{f}{y}{x}$$
Clairaut’s Theorem:
If $F$ is defined on a disk, $D$, that contains point $(a, b)$, and both $f_{xy}$ and $f_{yx}$ are continuous on the disk, then $f_{xy}(a, b) = f_{yx}(a, b)$
Partial Differential Equations
-
Partial Differential Equations: Used to express physical laws and describe phenomina
-
Laplace’s equation: The following partial differential equation (2 dimensional version):
$$ \pdv[2]{u}{x} + \pdv[2]{u}{y} = 0$$ -
Harmonic Functions: The solutions to Laplace’s equation
- Used in heat conduction, fluid flow, electric potential, etc
-
Wave Equation: Describes waves
$$ \pdv[2]{u}{t} = a^2 \pdv[2]{u}{x}$$
14.4: Tangent Planes and Linear Approximation
Tangent Planes
If $f$ has continuous partial derivatives, the equation of the tangent plane at a point is the following:
$$ z - z_0 = f_x(x_0, y_0) (x - x_0) + f_y(x_0, y_0)(y-y_0)$$
This is similar to how in single-variable calculus, the equation of the tangent line was the following:
$$ y-y_0 = f’(x_0)(x - x_0)$$
Linear Approximations
You can use the tangent plane at a point to approximate a function at a nearby point like in single-variable calculus.
14.5: Chain Rule
From single variable calculus
$$\frac{df}{dx}= \frac{d}{dx}\left(f(g(x))\right) = f’(g(x)) g’(x) = \frac{df}{dg}\frac{dg}{dx}$$
For multivariable:
$$ \frac{dw}{dt} = \frac{d}{dt} \left(x(t), y(t)\right) = \pdv{w}{x} \dv{x}{t} + \pdv{w}{y} \dv{y}{t}$$
14.6: Directional Derivative and Gradient
Directional Derivative
If $f$ is differentiable, $f$ has a directional derivative in the direction of the unit vector $\vb{u} = \ev{a, b}$
$$ D_u f(x, y) = f_x(x, y)a + f_y(x, y)b = \ev{f_x(x, y), f_y(x, y)} \cdot \vb{u}$$
Gradient vector
$$\nabla f = \text{del } f = \ev{f_x(x, y), f_y(x, y)}$$
Maximizing the Directional Derivative
- Q. If we have a function $f$, and consider all directional derivatives at a point, then which directional derivative is greatest (“steepest” or has the fastest rate of change)
- A. When $\vb{u}$ is in the same direction as the gradient vector since that will maximize the directional derivative
Equation of Tangent Plane to Level Surface
$$ \pdv{F}{x} \dv{x}{t} + \pdv{F}{y} \dv{y}{t} + \pdv{F}{z} \dv{z}{t} = 0$$
$$ \nabla F \cdot \vb{r}'(t) = 0$$
$$ F_x(x_0, y_0, z_0) (x-x_0) + F_y(x_0, y_0, z_0) (y - y_0) + F_z(x_0, y_0, z_0)(z-z_0)=0$$
14.7: Maximums and Minimums (Optimization)
$z=f(x, y)$ to be optimized
Local max at $(x_0, y_0)$ if $f(x, y) \le f(x_0, y_0)$ for all points $(x, y)$ near $(x_0, y_0)$
1st Derivative Test
Local extrema at $(a, b)$ if $\nabla f(a, b) = DNE$ or $\nabla f(a, b) = 0$ (Converse is not true)
2nd Derivative Test
Suppose $\nabla f(a, b) = \ev{0, 0}$
Calculate the following
$$D = det\left(\begin{bmatrix}
f_{xx} & f_{xy} \\
f_{yx} & f_{yy}
\end{bmatrix} \right) = f_{xx} f_{yy} - f_{xy}^2$$
- If $D(a, b) < 0$, there is no local extrema, but there is a saddlepoint
- If $D(a, b) = 0$, no conclusion is possible
- If $D(a, b) > 0$, then calculate $f_{xx}$
- If $f_x(a, b) > 0$, there is a local min
- If $f_x(a, b) < 0$, there is a local max
- If $f_x(a, b) = 0$, no conclusion is possible
15.1: Double Integrals over Rectangles
Volume $V$ of a solid above the rectangle $R$ and below the surface $z = f(x, y)$:
$$ V = \iint\limits_R f(x, y) dA $$
where $dA$ represents the area of the sub-rectangles that compose the large rectangle $R$.
Fubini’s Theorem
If $f$ is continuous on the rectangle $R = \{(x, y) | a \le x \le b, c\le y \le d \}$, then
$$ \iint\limits_R f(x, y) dA = \int_a^b \int_c^d f(x, y) \, dy \, dx = \int_d^c \int_a^b f(x, y) \, dx \, dy$$
If $R = [a, b] \cross [c, d]$
$$ \iint\limits_R g(x) \, h(y) \, dA = \int_a^b g(x) \, dx \int_c^d h(y) \, dy$$
15.2: Double Integrals over General Regions
- We can take the double integral over a general region $D$ instead of just a rectangle
- Let $F(x, y)$ be defined as the following:
$$
F(x, y) = \begin{cases}
f(x, y) & \text{if }(x, y) \text{ is in } D \\
0 & \text{if }(x, y) \text{ is in } R \text{ but not in } D
\end{cases}
$$
$$ \iint\limits_{D} f(x, y) dA = \iint\limits_R F(x, y) dA$$
-
If $D$ is lies between two continuous functions, $g_1(x)$, and $g_2(x)$ and if $f$ is continuous on a region $D$ such that
$$ D = \{ a \le x \le b, g_1(x) \le y \le g_2(x)\}$$
then
$$ \iint\limits_{D} f(x, y)\, dA = \int_a^b \int_{g_1(x)}^{g_2(x)} f(x, y) \, dy \, dx$$ -
If $f$ is continuous on a region $D$ such that
$$ D = \{ c \le y \le d, h_1(y) \le y \le h_2(y)\}$$
then
$$ \iint\limits_{D} f(x, y)\, dA = \int_b^c \int_{h_1(y)}^{h_2(y)} f(x, y) \, dx \, dy$$
Properties of Double Integrals
- $$ \iint\limits_D \left(f(x, y) + g(x, y)\right) \, dA = \iint\limits_D f(x, y) \, dA + \iint_D g(x, y) \, dA $$
- If $c$ is a constant, $$ \iint\limits_D cf(x, y) \, dA = c \iint\limits_D f(x, y) \, dA $$
- If $f(x, y) \ge g(x, y)$ for all $x, y$ in $D$
$$ \iint\limits_D f(x, y) \, dA \ge \iint\limits_D g(x, y) \, dA $$ - If $D = D_1 \cup D_2$, and $D_1$ and $D_2$ don’t overlap
$$ \iint\limits_D f(x, y)\, dA = \iint\limits_{D_1} f(x, y) \, dA + \iint\limits_{D_2} f(x, y) \, dA $$ - $$ \iint\limits_D 1 \, dA = A(D) = \text{Area of }D$$
- If $m \le f(x, y) \le M \; \forall (x, y) \in D$
$$ m \, A(D) \le \iint\limits_D f(x, y) \, dA \le M\,A(D)$$
15.3: Double Integrals in Polar Coordinates
$$ x = r \cos \theta \;\;\;\;\; y = r \sin \theta \;\;\;\;\; x^2 + y^2 = r^2$$
Double Integrals over Polar Rectangles
$$ \iint\limits_R f(x, y) \, dA = \int_{\alpha}^{\beta} \int_b^a f(r \cos \theta, \, r \sin \theta) r \, dr \,d\theta$$
Double Integrals over General Polar Regions
$$ \iint\limits_D f(x, y) \, dA = \int_{\alpha}^{\beta} \int_{h_1(\theta)}^{h_2(\theta)} f(r \cos \theta, \, r \sin \theta) r \, dr \,d\theta$$
15.5: Surface Area
For a function $f(x, y)$, the surface area can be computed with the following:
$$ A(S) = \iint\limits_D \sqrt{f_x(x, y)^2 + f_y(x, y)^2 + 1} \; dA$$
15.6: Triple Integrals
15.7: Triple Integrals with Cylindrical Coordinates
Cylindrical to rectangular
$$ x = r \cos \theta, \ \ \ y = r \sin \theta, \ \ \ z = z$$
Rectangular to Cylindrical
$$ r^2 = x^2 + y^2, \ \ \ \tan \theta = \frac{y}{x}, \ \ \ z = z$$
15.8: Triple Integrals with Spherical Coordinates
$$ x = \rho \sin \phi \cos \theta, \ \ \ y = \rho \sin \phi \sin \theta, \ \ \ z= \rho \cos \phi $$
$$ \rho^2 = x^2 + y^2 + z^2$$
$$ \iiint\limits_{E} f(x, y, z) \ dV= \int_c^d \int_\alpha^\beta \int_a^b f(\rho \sin \phi \cos \theta, \rho \sin \phi \sin \theta, \rho \cos \phi) \ \rho^2 \sin \phi \ d \rho \ d\phi \ d\theta $$
16.2: Line Integrals
Line Integrals of Functions
$C$ is a curve
$$ \int_{C} f(x, y) \ \ ds= \int_{a}^{b} f(x(t), y(t)) \ \ \sqrt{\left(\frac{dx}{dt}\right)^2 + \left(\frac{dy}{dt}\right)^2} \ \ dt$$
Line integrals of Vector Fields
Calculate a line integral along a curve $C$ in a vector field $\vec{F}$
$$ \int\limits_C \vec{F} \cdot d\vec{r} = \int\limits_C \vec{F} \cdot \vec{T} \ ds$$
where $\vec{T}$ is a unit tangent vector to $C$ in the direction of increasing $T$
Calculation (in general): use parametrization
$$ = \int_a^b \vec{F}\left( \vec{r}(t) \right) \cdot \vec{r}’ (t) \ dt $$
16.7: Surface Integrals (of Functions)
$S$ is a surface given by $z = f(x, y)$ where $(x, y) \in D$
$$ \iint\limits_S g(x, y, z) \ dS = \iint\limits_D g(x, y, f(x, y)) \sqrt{1 + f_x(x, y)^2 + f_y(x,y)^2} \ dA$$
For surface area, $g(x, y, z) = 1$
16.4: Green’s Theorem
To evaluate a line integral:
$$ \int_C \vec{F} \cdot d\vec{r}$$
Three options
- From definition: use a parametrization $\vec{r}(t)$ for C, etc.
- Use Fundamental Theorem: only works if $\vec{F}$ is conservative and needs a potential
- Green’s Theorem: Needs C to be closed
Given
- A curve $C$ (“piecewise smooth”) in $xy$-plane
- closed: start = end
- simple: does not cross itself (no figure 8)
- positively oriented (counterclockwise) - easy adjustment if clockwise
- $D$ (region in the $xy$-plane
- a vector field $\vec{F} = \ev{P(x, y), Q(x, y)}$
Green’s Theorem
$$ \int_C \vec{F} \cdot d\vec{r} = \iint\limits_{D} (Q_x - P_y) \ \ dA $$
Remarks
- Green’s Theorem implies the criterion (earlier)
$$ \vec{F} \text{ conservative } \iff P_y = Q_x$$
- Forward implication follows from Clairaut’s Theorem
- Reverse implication follows from Green’s Theorem
- Right Hand Side (RHS) is usually earlier than the LHS
Example
Evaluate $\oint x^2 y^2 \ dx + xy \ dy$
$C$: arc of the parabola $y=x^2$ from $(0,0)$ to $(1, 1)$ followed by the line segments $(1, 1)$ to $(0, 1)$ and from $(0,1)$ to $(0,0)$
$$ P = x^2 y^2, \ \ Q = xy $$
$$ P_y = 2yx^2, \ \ Q_x = y$$
$$ \int_C \vec{F} \cdot d\vec{r} = \iint\limits_D (y - 2yx^2) \ dA$$
$$ = \int_{0}^{1} \int_{x^2}^{1} (y - 2yx^2)\ dy \ dx$$
$$ = \int_0^1 \left. \frac{y^2}{2} - y^2 x^2 \right\vert_{y = x^2}^{y = 1} dx = \int_0^1 \left(-\frac{x^4}{2}+ x^4 + (\frac{1}{2} - x^2)\right) dx$$
Example
$$ \oint \vec{F} \cdot d\vec{r}$$
$$ \vec{F} = \ev{e^{-x} + y^2 , e^{-y} + x^2}$$
$C$: Arc of the curve $y = \cos x$ from $(-\frac{\pi}{2}, 0)$ to $(\frac{\pi}{2} , 0)$ followed by the line segment back from $(\frac{\pi}{2}, 0)$ to $(\frac{-\pi}{2}, 0)$
Clockwise!
Rule: For any curve $C$, $-C$ denotes $C$ with the direction reversed
Outlook
Green’s Theorem implies the earlier criterion: $P_y = Q_x \implies \vec{F} \text{ is conservative }$
$$ \int_C \vec{F} \cdot d\vec{r} = \iint_D \underbrace{0}_{Q_x - P_y = 0} dA = 0$$
for any closed, single curve (any orientation), $C$
It then follows that, for any curve $C$ (not necessarily closed), $\int_C \vec{F} \cdot d\vec{r}$ only depends on the end points of $C$
- Independence of path
16.4: Curl and Divergence (n = 3)
3-dimensions
Given: $\vec{F} = \ev{P(x, y, z), Q(x, y, z), R(x, y, z)}$
Let $\nabla = \ev{\pdv{}{x}, \pdv{y}, \pdv{t}}$
then for a function $f = f(x, y, z)$
$\nabla f = \ev{\pdv{x} f, \pdv{y} f, \pdv{z} f}$ as we know already (gradient)
Definition
$$ div \vec{F} = \nabla \cdot \vec{F} = \pdv{x} P + \pdv{y} Q + \pdv{z} R =P_x + Q_y + R_z$$
$$ curl \vec{F} = \nabla \cross \vec{F} = \begin{bmatrix} \hat{i} & \hat{j} & \hat{k} \\ \pdv{x} & \pdv{y} & \pdv{z} \\ P & Q & R \end{bmatrix} = \ev{R_y - Q_z, P_z - R_x, Q_x - P_y}$$
Theorem
$$ \vec{F} \text{ conservative } \iff \curl\vec{F} = \ev{0, 0, 0}$$
Remarks
- Generalizes our old criterion for conservativity of $\vec{F} = \ev{P(x, y), Q(x, y), 0}$
- Again (as for n=2), the implication $\implies$ follows from Clairaut’s Theorem
$$ \vec{F} \text{ is conservative} \implies \exists f: \nabla f = \vec{F} \implies \curl \vec{F} = \nabla \cross \nabla f = \ev{0, 0, 0}$$
Example
$$\vec{F} = \ev{xyz^4, x^2 z^4, 4x^2 yz^3}$$
- Is the above conservative?
- If so, find a potential
$$ \nabla \cross \vec{F} = \ev{R_y - Q_z, P_z - R_x, Q_x - P_y} $$
$$ P_y = xz^4$$
$$ Q_x = 2xz^4$$
$xz^4 \neq 2xz^4$, so $\vec{F}$ is not conservative
Facts
- $\vec{F}$ is conservative $\iff$ curl $\vec{F} = \vec{0}$
- div(curl($\vec{F}$)) = 0
16.7: Surface Integrals (Of Vector Fields)
New: Surface Integrals of Vector Fields
- Only for surfaces of the form
$$ S: z = g(x, y) \ \ \ \ (x, y) \in D$$
$$ \iint\limits_S \vec{F} \cdot d\vec{S} = \iint\limits_S \vec{F} \cdot \underbrace{\vec{n}}_{\text{unit normal vector}} \ dS $$
$$ = \iint\limits_D \vec{F} \cdot \vec{n} \sqrt{1 + g_x^2 + g_y^2} \ dA $$
Applications
“Flux” of $\vec{F}$ across the surface $S$
- $> 0 $ means more gas flows through $S$ in the direction of $\vec{n}$ (upwards) than the opposite direction
In detail
- Upward orientation
$$ \vec{n} = \frac{\ev{1, 0, g_x} \cross \ev{0, 1, g_y}}{|\ev{1, 0, g_x} \cross \ev{0, 1, g_y}|} = \frac{\ev{-g_x, -g_y, 1}}{\sqrt{1+g_x^2 + g_y^2}}$$
where $\ev{1, 0, g_x}$ and $\ev{0, 1, g_y}$ are tangent vectors to a point on $S$
Formula (For calculations)
Assuming $n$ is upwards (if downwards, then negate the formula for $n$)
$$ \vec{F} = \ev{P, Q, R}$$
$$ \vec{n} = \frac{\ev{-g_x, -g_y, 1}}{\sqrt{1+g_x^2 + g_y^2}}$$
$$ \iint\limits_{S} \vec{F} \cdot d\vec{S} = \iint\limits_D \vec{F} \cdot \vec{n} \sqrt{1 + g_x^2 + g_y^2} \ dA$$
$$ \iint\limits_{S} \vec{F} \cdot d\vec{S} = \iint\limits_D \vec{F} \cdot \ev{-g_x, -g_y, 1} \ dA= \iint\limits_D \left(-P \ g_{x} - Q \ g_{y} + R\right) \ dA$$
Example
$$ \vec{F} = \ev{-x, -y, z^3}$$
- $S$: part of the cone $z = \sqrt{x^2 + y^2}$
between the surfaces $z = 1$ and $z = 3$ - Orientation: Downwards
$$ g_x = \frac{x}{x^2 + y^2}$$
$$ g_y = \frac{y}{x^2 + y^2}$$
$$ \iint\limits_{S} \vec{F} \cdot d\vec{S} = - \iint\limits_D (-P g_x - Q g_y + R) \ dA$$
$$ = - \iint\limits_{D} \left(\frac{x^2}{\sqrt{x^2 + y^2}} + \frac{y^2}{\sqrt{x^2 + y^2}}\right) + (z^3) \ dA$$
$$ = -\iint\limits_{D} \left(\frac{x^2}{\sqrt{x^2 + y^2}} + \frac{y^2}{\sqrt{x^2 + y^2}}\right) + (x^2 + y^2)^{3/2} \ dA$$
$$ = - \int_{0}^{2\pi} \int_{1}^{3} (r^2 + r^4) \ dr \ d\theta = - \frac{1712}{15} \pi$$
Application: Net flow of gas is up since flux is negative and normal is down
16.8: Stokes’ Theorem
Calculates result for surface integral in a certain case
$$ \iint\limits_S (curl \ \vec{F}) \cdot d\vec{S} = \oint\limits_C \vec{F} \cdot d\vec{r}$$
- $S$ is an oriented (up or down) surface in $\mathbb{R}^3$
- $\vec{F} = \ev{P, Q, R}$
- $C$: Closed curve that forms boundary of the surface $S$ in $\mathbb{R}^3$ oriented according to Right Hand Rule (RHR)
Special Case of Stokes’ Theorem
$$ \vec{F} = \ev{P, Q, 0}$$
$$ P= P(x, y) \ \ \ Q = Q(x, y)$$
$$ curl \ \vec{F} = \ev{0, 0, Q_x - P_y}$$
$$ (x, y) \in D$$
$$S = D \text{ in the xy plane} = \text{interior of curve }C$$
Stokes’ Theorem states:
$$ \oint\limits_C \vec{F} \cdot d\vec{r} = \iint\limits_D (Q_x - P_y) \ dA$$
- Note that the above result is just Green’s Theorem
- Stokes’ Theorem can be viewed as a general version of Green’s Theorem
Example
Calculate the following
$$ \iint\limits_S \left(curl \ \vec{F}\right) \cdot d \vec{S} $$
$$ \vec{F} = \ev{x^2 z^2 , yz^2, \tan^{-1} (x^2 yz^2)}$$
$$ S: z = \sqrt{x^2+y^2} \text{ cone oriented up} \ 0 \le z \le 2$$
Boundary curve $C$ (counter-clockwise by RHR)
$$ x^2 + y^2 = 4$$
Parametrization is still counter-clockwise
$$ C: \vec{r}(t) = \ev{ 2\cos t,2 \sin t, 2}$$
$$ \iint\limits_S (curl \ \vec{F})\cdot d\vec{S} = \oint\limits_C \vec{F} \cdot d\vec{r}$$
Just calculate line integral
16.9 Divergence Theorem (Dim 3)
Given
- $\vec{F} = \ev{P, Q, R}$
- $E$ as a solid in $\mathbb{R}^3$ (“simple” $\implies$ bounded)
- $S = \partial E$ (boundary of $E$ oriented upwards)
$$ \iint\limits_{S} \vec{F} \cdot \vec{dS} = \iiint\limits_{E} div\ \vec{F} \ dV$$
Example
$$ \vec{F} = \ev{x^2 y z , xy^2 z, xyz^2}$$
S = the box enclosed by the following
$$ x= 0, x = a, y = 0, y=b, z = 0. z =c$$
Orientation is outwards
$$ \iint\limits_{S} \vec{F} \cdot \vec{dS} = \iiint\limits_{E} div \ \vec{F} \ dV$$
$$= \int_0^a \int_0^b \int_0^c div \ \vec{F} \ dz \ dy \ dx $$
$$= \int_0^a \int_0^b \int_0^c div \ \vec{F} \ dz \ dy \ dx = a^2b^2c^2 \div F $$
Example
$$ \vec{F} = \ev{z, y, zx}$$
S = surface of the tetrahedron enclosed by the coordinate planes & the plane
$$\frac{x}{a} + \frac{y}{b} + \frac{z}{c} = 1$$
E = inside tetrahedron
$$ \iint\limits_{S} \vec{F} \cdot \vec{dS} = \iiint\limits_{E} div\ \vec{F} \ dV$$
$$\iiint\limits_{E} (1 +x) \ dV$$
$$ 0 \le x \le b$$
$$ 0 \le y \le b\left(1 - \frac{x}{a}\right)$$
$$ 0\le z \le c\left(1 - \frac{x}{a} - \frac{y}{b}\right)$$
$$ \int_0^{a} \int_{0}^{b(1-\frac{x}{a})} \int_0^{c(1-\frac{x}{a} - \frac{y}{b})} (1+x) dz \ dy \ dx$$
Summary of Green’s, Stokes’, Divergence Theorems
-
Green’s Theorem
$$ \vec{F} = \ev{P, Q}, \ \ \ P(x, y) = P, \ \ \ Q(x, y) = Q$$
$C$ closed curve in $xy$ plane ($\mathbb{R}$) oriented counter clockwise (positive orientation)
$$ \oint\limits_C = \vec{F} \cdot d\vec{r} = \iint\limits_D (Q_x - P_y) \ dA$$
where $D$=Interior of $C$ -
Stokes’ Theorem
$$ \vec{F} = \ev{P, Q, R}, \ \ \ P(x, y) = P, \ \ \ Q(x, y) = Q, \ \ \ R = R(x, y)$$
Closed curve $C$ in $\mathbb{R}^3$ oriented counter-clockwise when viewed from above
$$ \oint\limits_C \vec{F} \cdot d\vec{r} = \iint\limits_S \curl F \cdot d\vec{s}$$ where $S$ is a surface in $\mathbb{R}$ with boundary $C$ and $\vec{n}$ oriented up
- Divergence Theorem
$F$ is the same as in Stokes’
$S$ is a surface, closed in $\mathbb{R}^3$ oriented out
$$ \iint \vec{F} \cdot d\vec{S} = \iiint\limits_{E} \div F \ \ dV$$
$E$ is a solid in the interior of $S$